|
|
|
|
|
|
|
|
|
|
|
| [GitHub] |
|
|
 |
|
Citation |
|
@inproceedings{pathakCVPRW18segByInt,
Author = {Pathak, Deepak and
Shentu, Yide and Chen, Dian and
Agrawal, Pulkit and Darrell, Trevor and
Levine, Sergey and Malik, Jitendra},
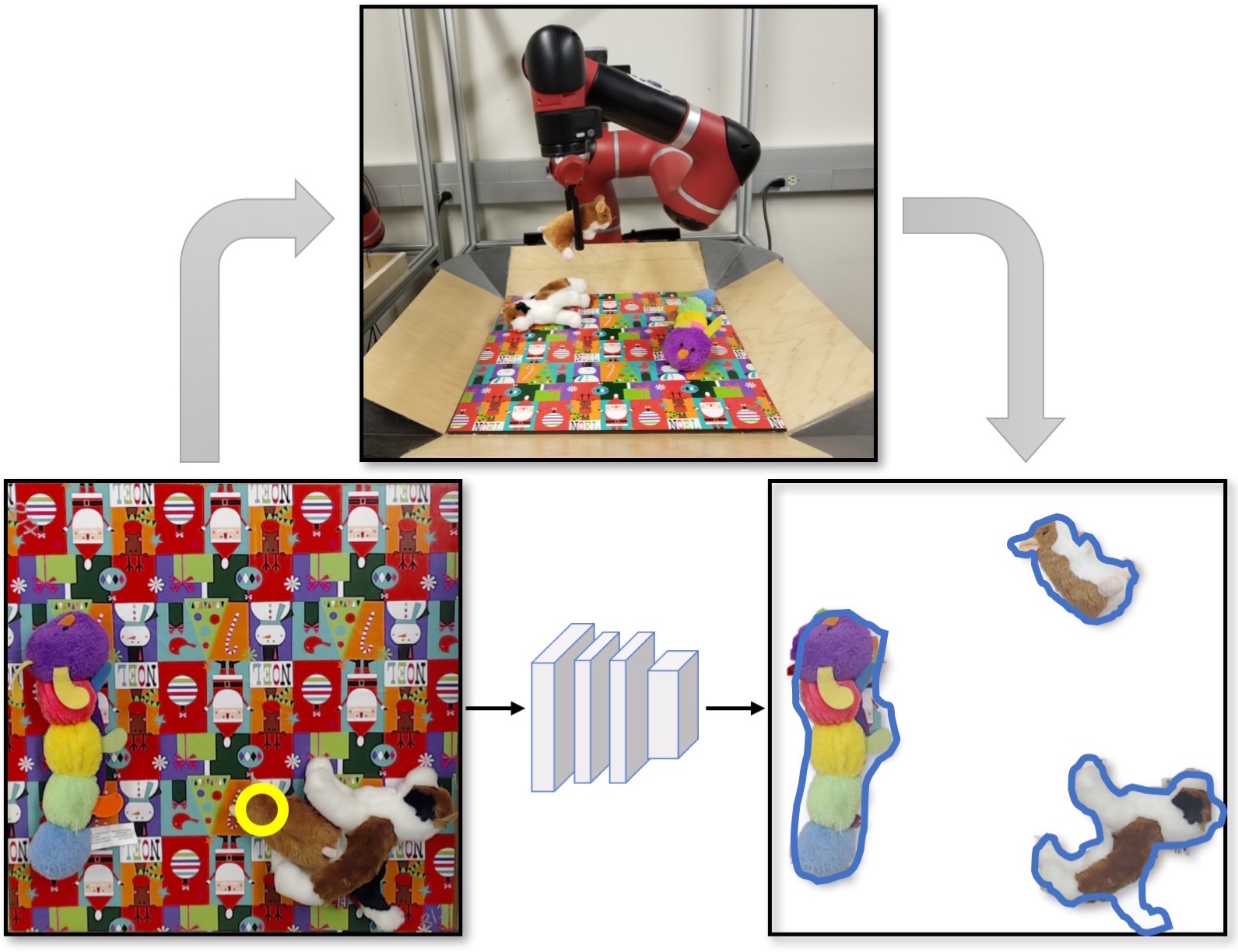
Title = {Learning Instance Segmentation
by Interaction},
Booktitle = {CVPR Workshop on Benchmarks for
Deep Learning in Robotic Vision},
Year = {2018}
}
|
Acknowledgements |